יְהִי אוֹר
起初,计算机的世界尚未渲染,显示器中空虚混沌,渊面黑暗。
唯有顶点与多边形悬于虚空,不见其形,不辨其色。
那声音说:“要有光。”
就有了光。
光是好的,于是那声音将光与暗分开了。光所照之处,物体的正面得以显现;光所不至的背面,则归于阴影。从此,三维的世界有了明暗与层次。
这光并非一体。
那普照万物,均匀散开,使物体显其本色的,称之为漫反射。
那汇于一点,锐利夺目,使光滑之物尽显其耀的,称之为镜面反射。
那弥漫于环境,充盈于阴影,使黑暗不至完全吞噬一切的,称之为环境光。
有漫反射,有镜面反射,有环境光,共同构成了这虚拟世界的第一个白昼。
漫反射(Diffuse Reflection)
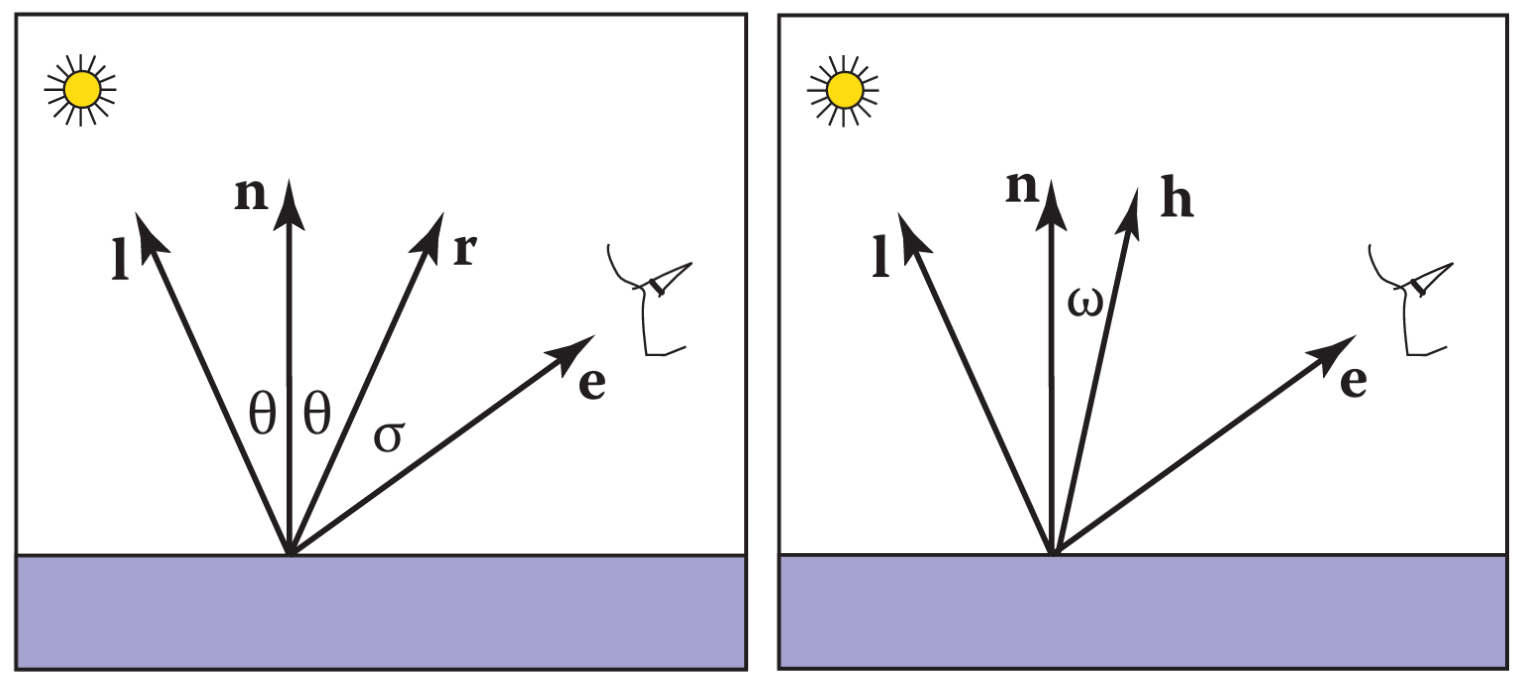
在漫反射中,光向四面八方散去,所以物体漫反射出的光与摄像机位置无关,而仅与以下几项有关:
- 光强 $c_l$.
- 物体材质 $c_r$. 不同物体对光的反射率是不同的,即使是同一个物体也对不同颜色的光有不同反射率。
- 物体表面法线 $\mathbf{n}$.
- 光源方向 $\mathbf{l}$.
最终结果可以写成
由于光强一般随距离衰减,所以 $c_l$ 一般反比于距离的平方 $r^2$.
镜面反射(Specular Reflection)
镜面反射中,光主要向一个方向反射,所以镜面反射的光与摄像机位置有关。
其中 $c_p$ 是自定义的 RGB 值,允许我们控制高光颜色,指数 $p$ 是为了保证我们只在小范围内看到高光,$p$ 越大这个高光可见范围越小,而 $\mathbf h$ 的定义如下:
还有一种写法把 $\mathbf n \cdot \mathbf h$ 换成了 $\mathbf r \cdot \mathbf e$,简单计算可以发现 $\mathbf
n$ 和 $\mathbf h$ 的夹角是 $\mathbf r$ 和 $\mathbf e$ 的夹角的一半,所以这两个写法在思路上是一样的,都在考虑反射光方向和摄像机方向的夹角,不过在数值上会略有差别。本文采用 $\mathbf n \cdot \mathbf h$ 的写法。
环境光(Ambient Lighting)
如果只考虑漫反射和镜面反射,我们会发现没有面朝光源的物体完全是黑色的,但现实里显然不是如此。这是因为在现实里,光经过多次反射而照亮了那些没有面朝光源的物体。我们可以近似地认为有一种充斥着整个空间的光,并把它叫做环境光,公式如下:
其中 $c_a$ 是环境光的强度。
冯氏光照模型
综合来看,我们就得到了冯氏光照模型,公式如下:
其中
- $c_r$ 是物体材质,表示物体对光的反射率,一般是一个 Vector3f 类型的值,因为物体对不同颜色的光有不同反射率;
- $c_a$ 是环境光强,一般是一个 Vector3f 类型的值;
- $c_l$ 是光强,一般与物体和光源的距离成反比,一般是一个 Vector3f 类型的值;
- $c_p$ 是高光颜色,一般也是一个 Vector3f 类型的值。
UV映射
为了把贴图贴到模型上,需要有一个 $(x, y, z) \rightarrow (u, v)$ 的函数 $\phi$. 我们期望这个函数有这些性质:
- 单射:我们不希望两个 3D 点映射到同一个 2D 点上
- 大小不变性:在 3D 模型上的三角形多大,我们希望 2D 的三角形也差不多大小
- 形状不变性:3D 模型的三角形映射到 2D 上后,两个三角形应尽量相似
- 连续:如果两个点在 3D 世界模型上相近,我们希望它们在 2D 上也相近
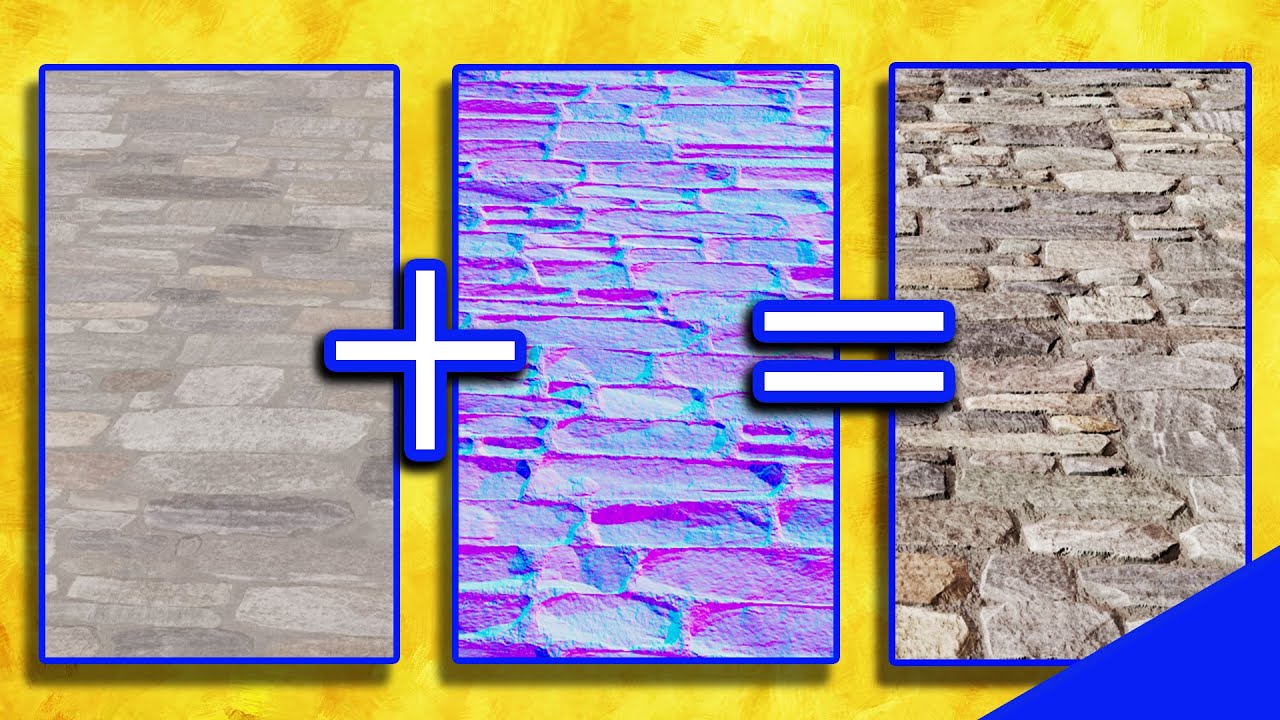
贴图有许多应用,最容易想到的是颜色贴图,它直接把颜色贴到模型上,也被称作漫反射贴图。
法线贴图、金属度贴图、粗糙度贴图则进一步决定了模型的各种属性。比如法线贴图定义了每一点的法线,在计算光照时会借助这个法线来得到更真实的结果。
着色方法
模型由三角形划分来表示,那么每个三角形用怎样的颜色呢?
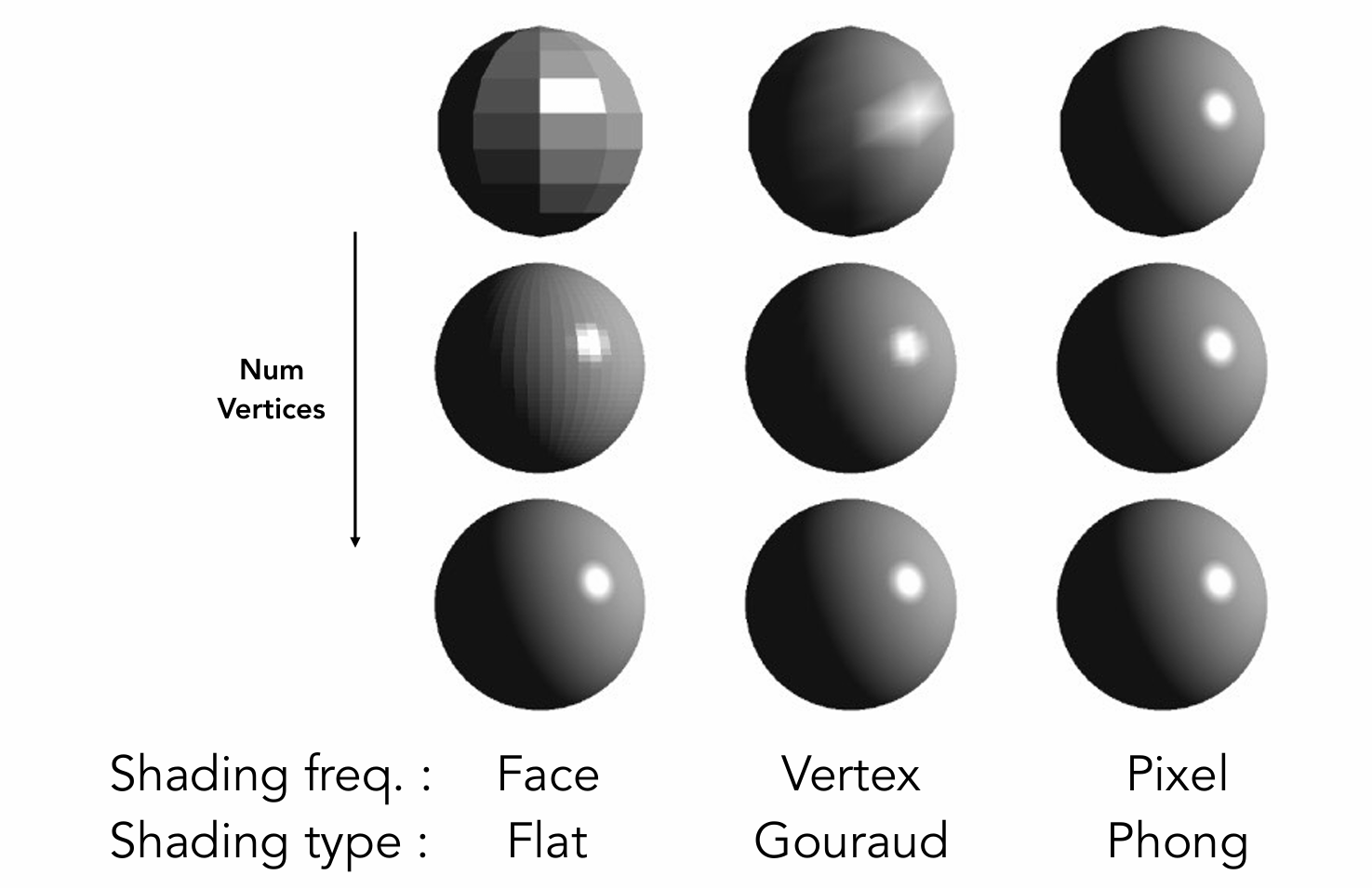
平面着色(Flat Shading)
我们通过光照计算颜色,而计算光照需要法线。平面着色直接求这个三角形的法线,然后按光照公式计算这个三角形的颜色。这种方法得到的每个三角形都是单色的。
逐顶点着色(Gouraud Shading)
逐顶点着色则求三角形顶点的法线,并为三角形顶点着色,然后对内部的每个点插值内部颜色。
那么顶点的法线是什么呢?一个顶点一般在多个面上,把这些面的法线做加权平均就好,权值可以是面的面积。
逐像素着色(Phong Shading)
逐像素着色同样求三角形顶点的法线,然后对内部的每个点插值内部法线,从法线再求各个点的颜色。
插值是通过重心坐标来插值。对三角形 $ABC$ 内的某一点 $P$,它可以表示为
这里的 $S$ 是面积,这里的形如 $S{APB}/S{ABC}$ 的式子就是各个点的权值。
在插值时,我们希望在世界空间 / 摄像机空间做插值,即在 viewing transformation 前进行插值,而不是 viewing transformation 后。
但我们一般在光栅化时才进行插值,这时已经把物体变换到了 NDC 空间,所以我们还要进行透视矫正。公式如下,具体推导可以参考 Homework 3 的笔记。
其中 $\alpha’,\beta’,\gamma’$ 是屏幕空间的重心坐标,$\alpha,\beta,\gamma$ 是世界空间的重心坐标。我们用世界空间的重心坐标作为权重来插值。
渲染管线
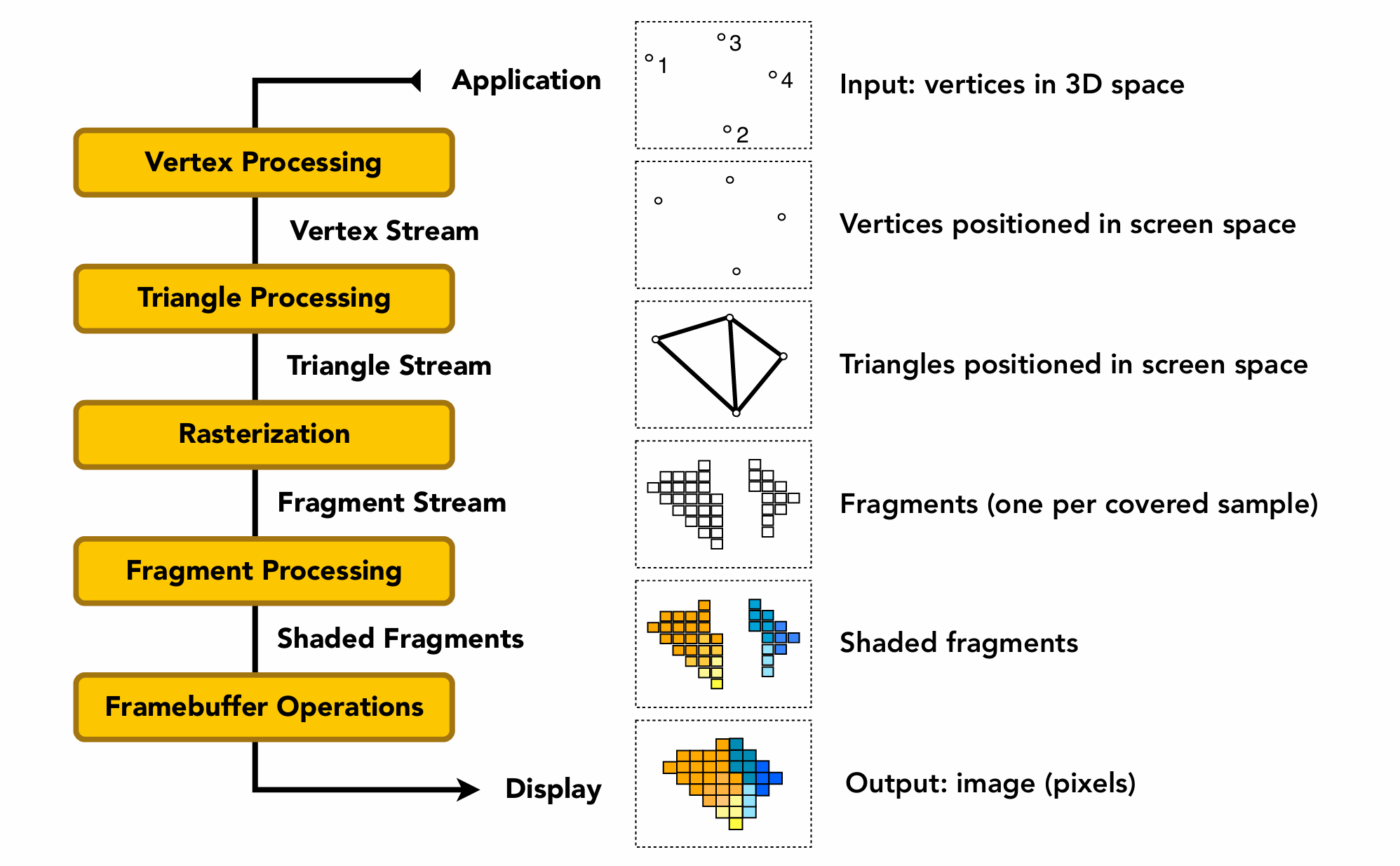
渲染流程基本如下:
- Input:输入 3D 世界的顶点
- Vertex Processing:用各种变换矩阵把顶点变换到屏幕空间
- Triangle Processing:根据传入的顶点连接方式在屏幕空间连接三角形
- Rasterization:把三角形转化成片元 / 像素
- Fragement Processing:应用贴图、光照等
- Framebuffer Operations:深度测试等
纹理放大和纹理缩小
在做纹理映射时,贴图太小和贴图太大都会有问题。
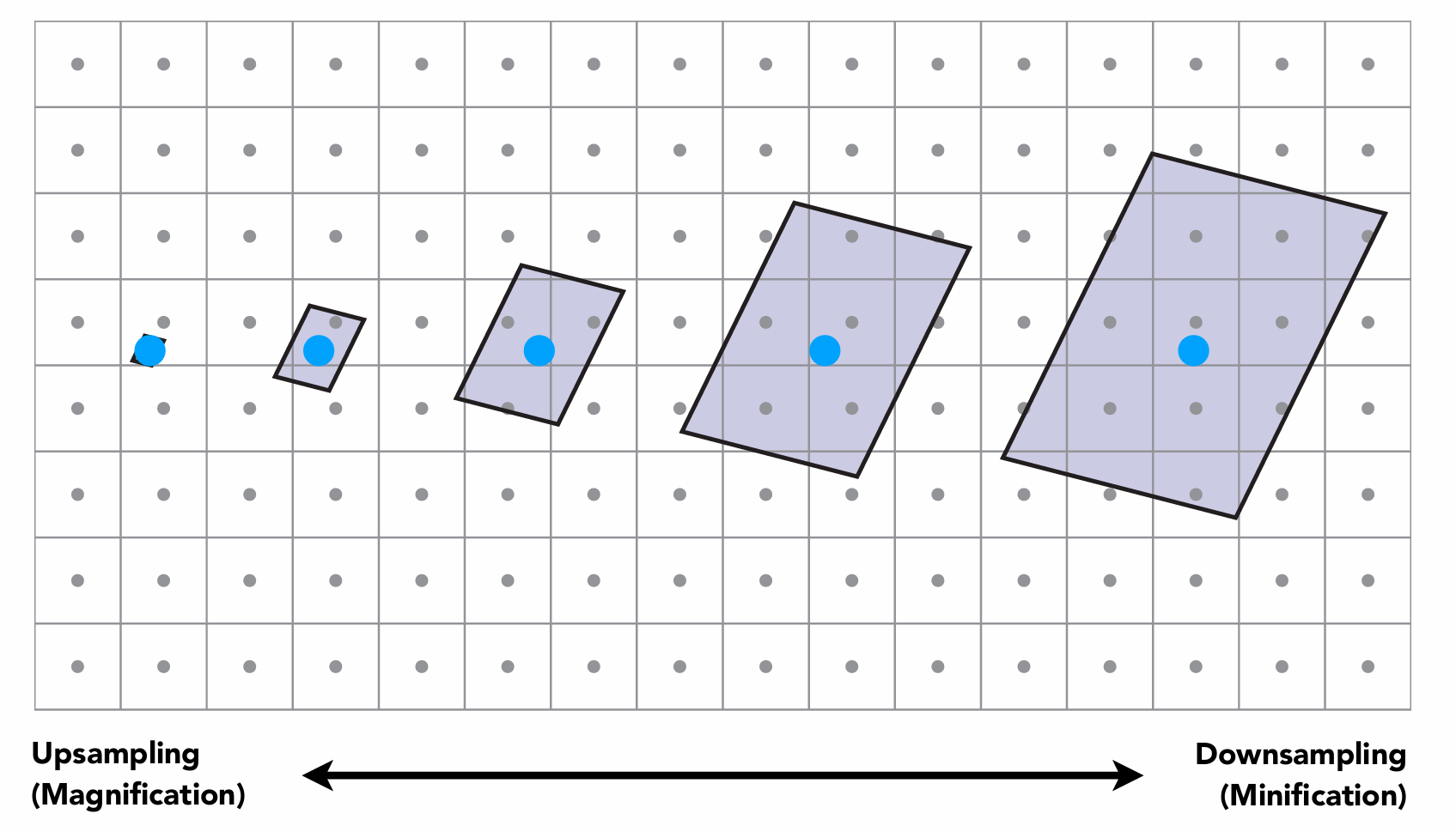
纹理放大
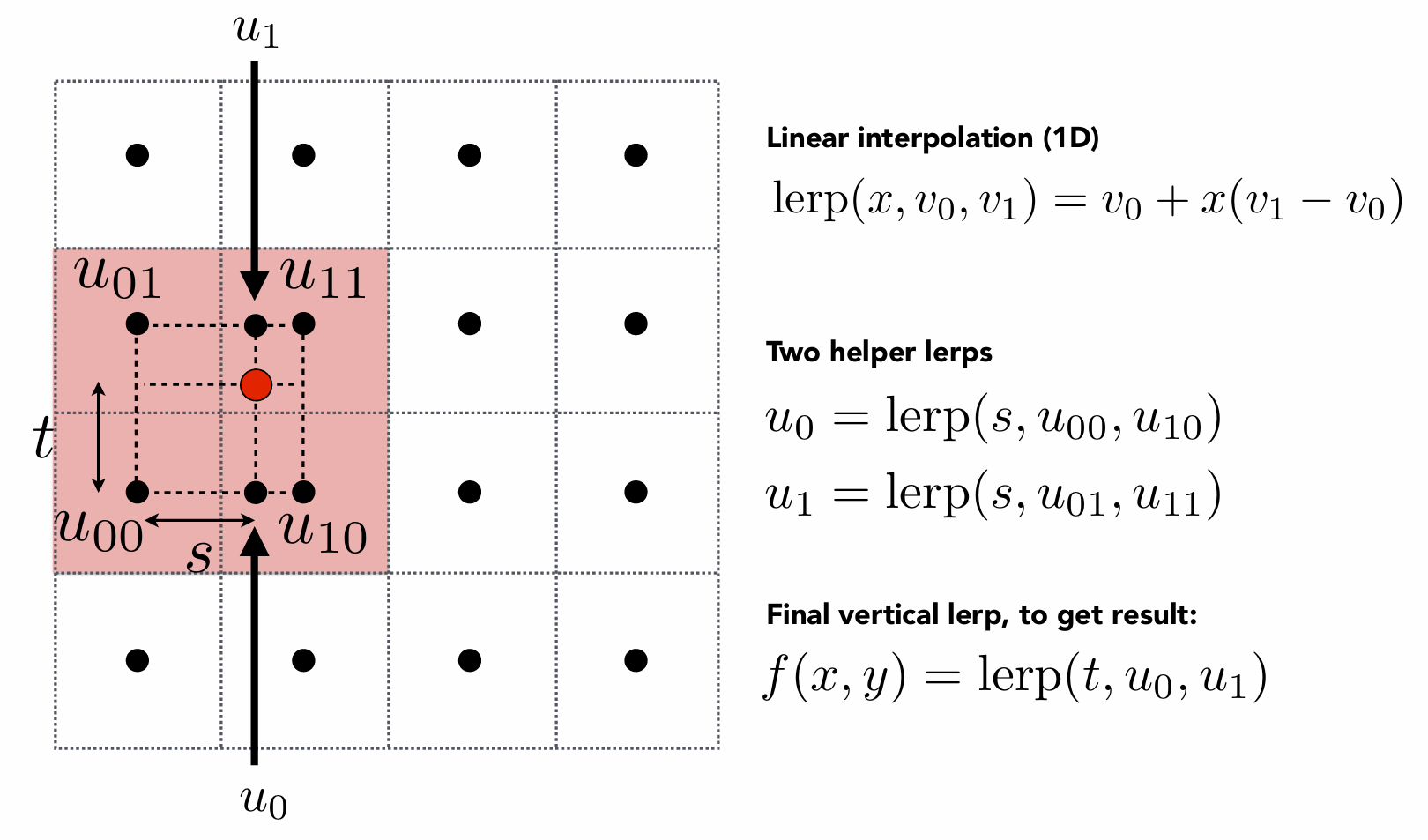
贴图太小时要做纹理放大,对采样点做双线性插值即可。
纹理缩小
贴图太大时直觉上比贴图太小更好处理,但恰恰相反。还记得频谱吗,贴图太大代表高频有更多信息,我们会因采样频率不足而无法正确反映高频信息,导致结果出现锯齿、摩尔纹等走样问题。
最常用的缓解方法是 Mipmapping。基本思路是,我们分析屏幕上每个像素在贴图上覆盖的像素数量,对那些覆盖较多的,就让他们去被缩小的贴图上采样,这样就能缓解欠采样问题。
首先我们要创建“缩小的贴图”,Mipmap链包含一系列纹理 $D_0, D_1, D_2, \ldots, D_N$,其中 $D_i$ 的分辨率为 $\frac{W}{2^i} \times \frac{H}{2^i}$,直到最内层为 $1 \times 1$ 像素。
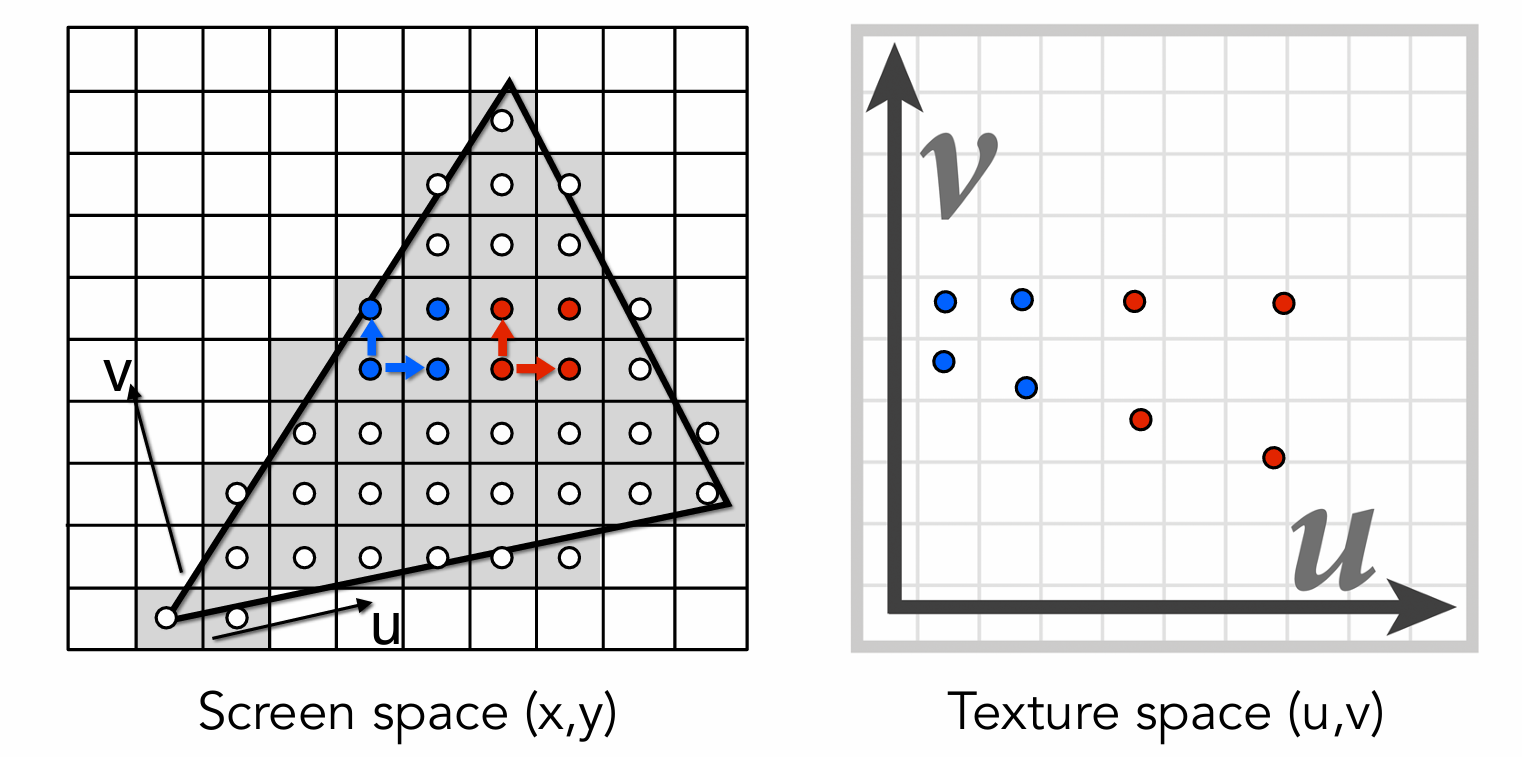
然后我们要分析单个屏幕像素覆盖了多少纹理像素,大致思路是计算屏幕空间的相邻点映射到贴图空间后的距离。贴图空间里相邻像素距离为 $1$,所以如果屏幕空间的相邻点映射到贴图空间后的距离为 $x$,我们就认为它覆盖了 $x$ 个像素。
这个“单个屏幕像素覆盖了多少纹理像素”的估算被记作 $\rho$,公式如下:
取 $\max$ 是为了尽可能取层级更低的 Mipmap。一个屏幕像素覆盖的纹理像素越多,它对应的 Mipmap 层级就越小。总之,我们宁可模糊,也不要欠采样。
最后用 $\lambda = \log_2{\rho}$ 就能算出这个屏幕像素对应的纹理层级。比如当 $\lambda = 0$ 时,表示一个屏幕像素恰好对应一个纹理像素,应使用原始纹理 $D_0$.
计算出层级 $\lambda$ 后还要做采样。显然 $\lambda$ 大多数时候都不是整数,所以有两种常见的采样方法:
最近邻Mipmap滤波(Nearest Mipmap Filtering)
选择最接近 $\lambda$ 的整数层级 $d = \text{round}(\lambda)$ 做采样,在这一层可以是最近邻或双线性滤波。
三线性滤波(Trilinear Filtering)
确定 $\lambda$ 两侧的两个整数层级:$d_1 = \lfloor\lambda\rfloor$ 和 $d_2 = \lceil\lambda\rceil = d_1 + 1$,在这两层分别做双线性滤波采样得到颜色 $C_1$ 和 $C_2$,然后得到最终颜色
其中 $f = \lambda - \lfloor\lambda\rfloor$ 为 $\lambda$ 的小数部分。
其他小知识
虎书提到的planar projection、spherical coordinates、cylindrical coordinates、cubemaps本质上都是把3d表面投影到一个理想的简单几何体上,然后把简单几何体展开成平面。